B站up主硬核打造「螃蟹火星车」,遥控、拍照、测距,还能做人脸
吃完的螃蟹壳是干垃圾还是湿垃圾?
或者,裹上一层黑科技,让它变身「火星车」,馋哭隔壁家小孩。
更硬核的是,这样一台螃蟹火星车,并非只是一个模型。
它支持WiFi无线图传、控制,手指在手机上移向哪里,车就跟着往哪里走。
能实现激光测距,限定目标距离:

还有惯性传感单元:
甚至还有AI功能加持,能实现目标跟踪。这,是用「脸」在开车??

这味儿,熟悉的读者盆友可能已经猜到了。
没错,策划、采购、烹饪、食用、电路、模型、加工、软件、算法一条龙,全是B站up主稚晖君一个人搞定的,且只花了一个周末就完成了。
就是那个开脑洞一直可以的网红技术宅「稚晖君」,本名彭志辉,目前是一名CV算法工程师。
自称「野生钢铁侠」,这次又做火星车,稚晖君说了,马斯克是他的偶像。
他希望自己能成为马斯克那样既脚踏实地又仰望星空的人。当然,做这个火星车只是一个象征性DIY,跟真实的火星车当然不能相提并论。
目前,该「螃蟹」已开源。B站馋哭的小伙伴已经忍不住复现了起来。
 不会焊板子的厨师不是好算法工程师从画PCB板到写前端后端代码,对「真·全栈」稚晖君而言已经是驾轻就熟。
不会焊板子的厨师不是好算法工程师从画PCB板到写前端后端代码,对「真·全栈」稚晖君而言已经是驾轻就熟。
这一次,他甚至涉足了美食区。

这样,就得到了一个金黄的螃蟹壳。
接下来,还是把目光放回知识区。
选芯片,绘制PCB板,就像我吃螃蟹一样一气呵成。
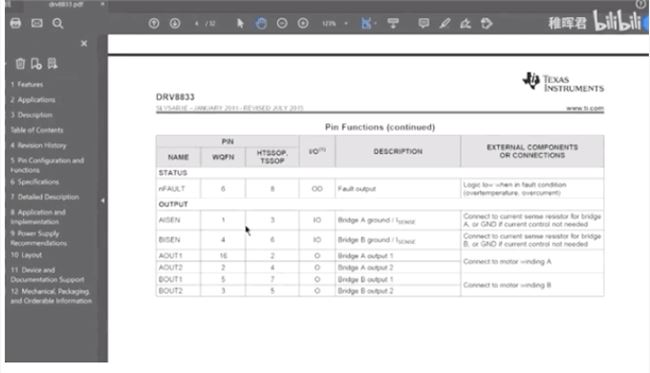
然后,给PCB板刷上焊锡膏,贴好芯片、电阻、电容等元器件,放到恒温加热台上煎至两面金黄,完成回流焊。

接着祭出3D打印机,制作火星车轮子的部分。

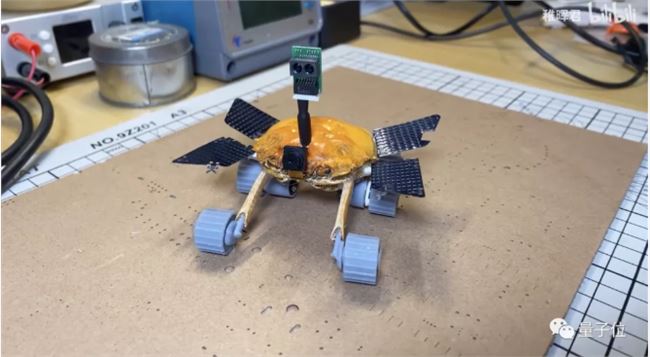
装上摄像头,把电路板嵌进螃蟹壳,再给螃蟹腿们按上轮子,装好太阳能电池板。
一个小遗憾是,这里的「太阳能电池板」并不是真的单晶硅。
稚晖君表示:本来计划用真的单晶硅来做,但是因为整机尺寸很小,这个面积下发电功率实际上是不太够的,所以最后没有采用。
总之,一套令人眼花缭乱的操作之下,螃蟹君完成「虚弱肉身,机械飞升」,成功进化成了一台迷你火星车!
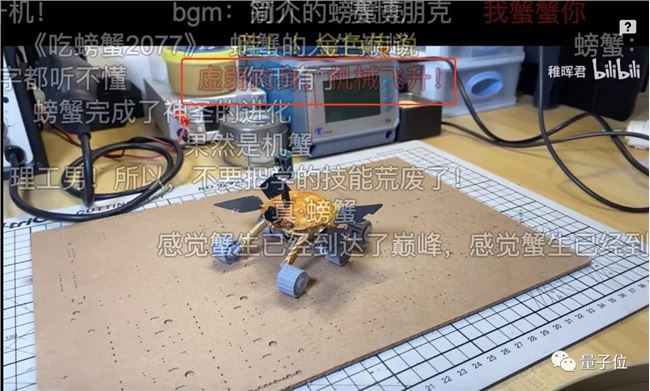
而这样一台「螃蟹火星车」,绝不是中看不中用。
稚晖君自己也说,其实项目硬件部分不复杂,最有意思的是软件和算法。

△稚晖君开发的CV算法部署框架
目前,通过将图像、IMU、ToF等数据传输到手机,将手机作为算力中心运行各种算法,螃蟹火星车能够实现以下几大功能。
WiFi无线图传和控制
使用系统级封装(SIP)的ESP32 作为主控。ESP32 是一种低成本,低功耗的单片机微控制器,集成了Wi-Fi和双模蓝牙。
因此,火星车能支持2.4GHz WiFi和低功耗蓝牙。并能通过Socket方式与手机进行通信,实现外网远程图传和控制。

目标跟踪
以手机作为算力中心,利用MTCNN人脸检测模型和KCF目标跟踪算法来实现人脸跟踪,并用PID闭环控制小车跟随。

激光测距
激光测距的实现原理跟手机上的「测距仪」相似,采用的是ToF传感器测距。
稚晖君还通过PID闭环控制,实现了限定目标距离。在限定距离下,手动,小车也会跟着移动。
IMU(惯性传感单元)
采用MPU6050 传感器,I2C接口。
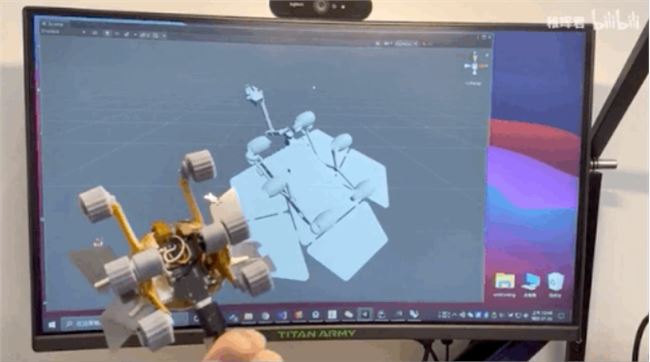
接下来,稚晖君计划通过IMU和ToF实现简化的SLAM算法,给螃蟹火星车加入自主导航系统。
ToF可以用于避障,而通过小车搭载的RGB相机和IMU,可以用来实现简单的单目VSLAM。
稚晖君表示,他以前做过一点ORB-SLAM相关的工作,所以打算把这部分往螃蟹身上移植。
那么为什么想到做这个项目的呢?
稚晖君表示:真·赛博螃克看完之后,是不是也觉得自己能做到「食用」这步。还有对螃蟹过敏的网友表示,我只能做到「拍摄」了。
当然,网友们还给这个「螃蟹号火星车」取了一些有趣的绰号。
什么「机械螃蟹」、「火星登蟹车」……以及有网友表示,这是真 ·「赛博螃克」呀!

不过,也有网友给出「差评」:这螃蟹不是横着走的,差评!
还有今年的高考毕业生热切询问道:想干这个需要学什么专业?
网友还给他支招,前面那位,可以了解一下机械电子工程。还有自动化、通信工程专业的同学纷纷路过……

不过还是有网友表示,这已经是跨专业了,没有哪个专业学这么多东西的,或者说边学自己专业,再自学其他专业。
既然是火星车,是不是也要像天问一号那样七个月之后到达火星附近呢?
于是,就有网友预测:暗示七个月之后再更新。

既然如此,那我们就一起拭目以待~
最后温馨提示:螃蟹壳是干垃圾。
传送门:
视频演示:
https://www.bilibili.com/video/BV1ZA411e7Ff
项目地址:
https://github.com/peng-zhihui/MiniRover
稚晖君的其他硬核项目们:
这个B站up主太硬核了!纯手工打造AI小电视:硬件自己焊接,驱动代码全手写
如何把门禁卡做成你用不起的样子?B站up主自制迷你卡片,公司小区通刷,还带墨水屏的那种

